工业4.0是利用信息化技术促进产业变革的时代,是智能化时代,机器人也将与时俱全,
传统的机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。智能化时代,利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,提高生产效率和加工质量,基于机器视觉的工业机器人定位技术在国内Z早被应用于焊接机器人对焊缝的跟踪。
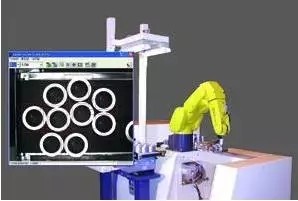
机器人视觉定位系统在关节型机器人末端安装单个摄像机,使工件能完全出现在摄像机的图像中。
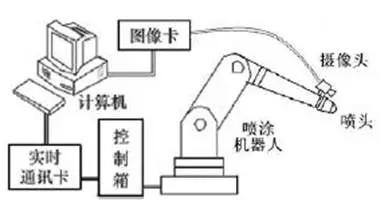
系统包括摄像机系统和控制系统:
1.摄像机系统:由单个摄像机和计算机(包括图像采集卡)组成,负责视觉图像的采集和机器视觉算法。就目前行业技术发展水平来说,数字相机是比较理想的选择,其中维视图像的MV-EM/E系列工业相机提供了接口丰富的开发包函数,分辨率、帧率等覆盖面广,通用性及稳定性好,所以是我们推荐的首要选择。
2.控制系统:由计算机和控制箱组成,用来控制机器人末端的实际位置。经CCD摄像机对工作区进行拍摄,计算机通过图像识别方法,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置误差值,Z后控制高精度的末端执行机构,调整机器人的位姿。
视觉引导机器人的工作原理:
使用CCD摄像机(包括镜头等图像采集设备)将视频信号输入计算机,并通过软件对其快速处理。
处理的过程:
选取被跟踪物体的局部图像,该步骤相当于离线学习的过程,在图像中建立坐标系以及训练系统寻找跟踪物。学习结束后,相机不停地采集图像,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置给定值,Z后控制高精度的末端执行机构,调整机器人的位姿。
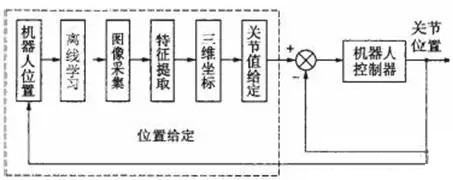
视觉定位系统将基于区域的匹配和形状特征识别结合,进行数据识别和计算,能够快速准确地识别出物体特征的边界与ZX,机器人控制系统通过逆运动学求解得到机器人各关节位置的转角误差,Z后控制高精度的末端执行机构,调整机器人的位姿以消除此误差。从而解决了机器人末端实际位置与期望位置相距较远的问题,改善了传统机器人的定位精度。
机器视觉系统的原理 通过光学系统,将需要拍摄的目标转换成为图像信号,再将图像信号传送至
rt,我是一个初学者,麻烦大家帮助我一下,Z近搞的一个课题涉及到机器视觉中的光源,指导老师给我推荐了个方向
我导师的研究方向是机器视觉及其应用。但机器视觉到底是什么呢?具体学习或研究什么呢?完全不懂,我感觉机器视觉
各位前辈,我现在刚上研究生,本科时掌握了不少电路、单片机的技术,简单会一些MFC编程,做过一些控制类的小项
自动化行业的机器视觉待遇怎么样?本科机械自动化专业,想从事机器视觉行业,机器视觉编程的工资待遇在深圳一般怎
有工控基础,熟悉几个常用的机械制图软件,机电一体工程师出身,日常用PLC编程,有一些C++基础只能说皮毛,
网上看了边干边学机器视觉 都没有完整版的 求完整版的,谢谢加分 NI官方出的,有三份,一分光源选择,一
您好,我对机器视觉这方面很感兴趣,非常想学,苦于找不到这方面的好教材。本人无视觉基础,大学读的是电气工程及
我想自学机器视觉,本人有些PLC编程基础,C++正在学习中,目前想学的机器视觉应用在产品正反面检测及产品摆
做机器视觉检测、CCD检测、零件识别检测等等有前途吗?我说跑业务? 还有本人从技术转业务,现在在找工作中

沪公网安备 31011502008050号




