工业机器人Z早应用于汽车制造领域,但技术发展至今,工业机器人的应用早已不局限于某个领域,现代工业的方方面面都有工业机器人的身影。工业机器人由主体、驱动系统和控制系统三个基本部分组成。工业机器人的分类方式很多,可以按机械结构、操作机坐标形式和程序输入方式等进行分类,下面就盘点一下工业机器人的种类:
1.关节机器人
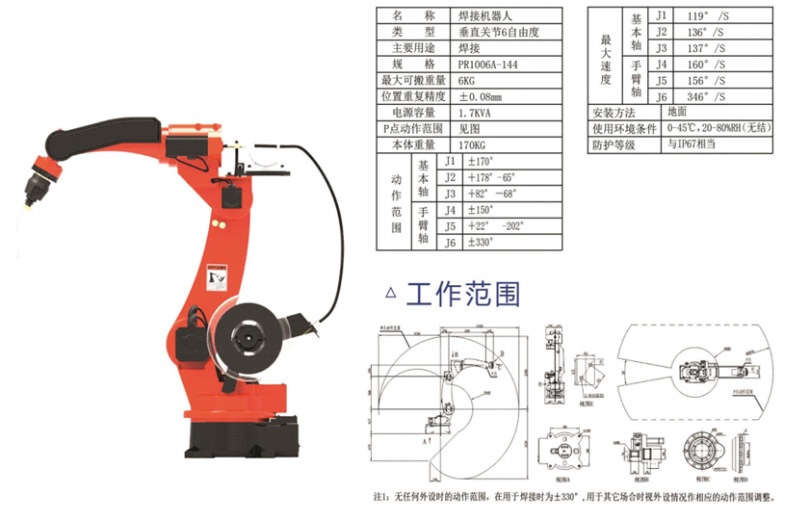
关节机器人也称关节手臂机器人或关节机械手臂,是当今工业领域中Z常见的工业机器人的形态之一。适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。机器人前3个关节决定机器人在空间的位置,后3个关节决定其姿态,多以旋转关节形式构成。
2.直角坐标机器人
也称桁架机器人或龙门式机器人。是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。特点:简单,控制方便,占地空间大。
3.串联和并联机器人
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的jing准度。
而并联机器人和传统工业用串联机器人在应用上构成互补关系,它是一个封闭的运动链。并联机器人不易产生动态误差,无误差积累精度较高。另外其结构紧凑稳定,输出轴大部分承受轴向力,机器刚性高,承载能力大。但是,并联机器人在位置求解上正解比较困难,而反解容易。
4.平面SCARA机器人
平面内运动,结构简单,性能优良,运算简单,适于精度较高的装配操作;SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。这类机器人的结构轻便、响应快,Z适用于平面定位,垂直方向进行装配的作业。
在包装生产线上整合机器人技术并得以应用,其实没有想象的那么复杂、危险与高成本,反而是非常简易而安全的,同时也
项目名称:鞋底加热自动化流水线项目需求:实现塑料生胶鞋底自动加热,每台鞋底加热1分钟时间,8台烤箱(总距离8
软体机器人技术是一个不断发展的领域,它依赖于模仿自然界中存在的软体的运动机制来实现平稳复杂的运动。在复杂环境
恭喜深圳乐动机器人有限公司子公司成功定购可程式恒温恒湿试验箱 恭喜我们爱佩科技被深圳乐动机器人有限
如题,机器人离线编程软件都有哪些?谁家技术做的比较好?请详细解答,谢谢! 目前机器人离线编程软件主要有:
Z近研发一款机器人,问了几个厂家都说得不清不楚,有没有知道机器人超声波传感器是用频率40KHz的吗? 机
问汽车焊接机器人的电极合金铜材料?只要是用哪一种寿命长一点的。 好像有稀土的、luo gao、详细点,请教
您好,我想向您咨询一下目前机器人的电源系统的一些情况。所有的机器人都是有电池的吗??如果是使用电池供电的话
扫地机器人说请放置储存盒”应该怎么做 请查看说明书或者拨打客服电话咨询,一般会给你详细讲解 相信您在知道
请问:工业机器人(如ABB)四轴或、五轴的,用什么软件编程控制的,请具体讲解下,谢谢! 方式:

沪公网安备 31011502008050号




