在我们的#CETONIacademy部分中,我们将开始定期讨论微流体的基础知识。该系列以“无脉动”一词开头,因为在微流体中,没有什么比恒定的流体流动更重要的了。
那么,什么是“无脉动”?
微流体领域的特点是应用涉及在同样小的腔体中的极少量流体。许多应用(例如在流动化学中发现的应用)需要稳定,无脉动的流体流动,以确保即使在很短的时间间隔内也能保持连续的混合比。在生物化学应用中分隔流的创建和操纵也需要这种流体流动的一致性。
在微流体中,术语“脉动”表示实际流量的振荡,否则其平均值可能是正确的。在微流体应用中经常出现的极小流速下(相对而言),脉动可能很强,并对小规模过程产生负面影响。即使机械组件无法提供完全无脉动的性能,也可以将脉动减小到不再能被现有的测量设备检测到的程度,或者不再对当前的实验应用过程产生影响。这种状态称为“无脉动”。
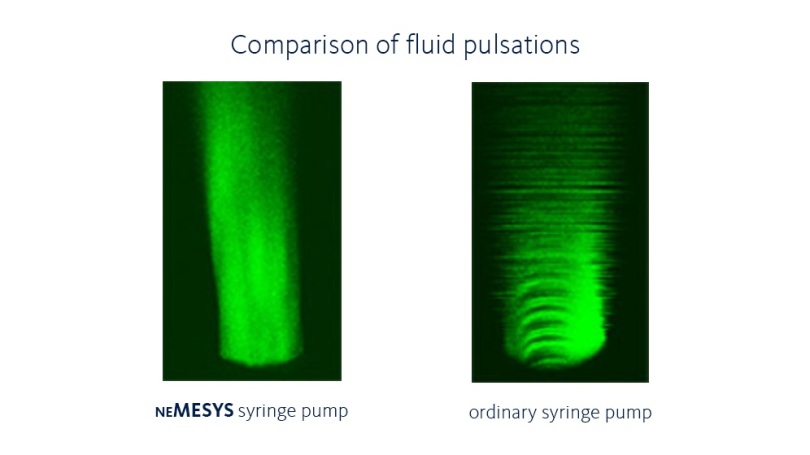
Pulsation characteristics (dosing of a fluid stream of 5μl/s with fluorescent colouring)
pictures Friedrich-Schiller-University Jena
拐弯处开车-闭上眼睛
注射泵允许使用自定义尺寸的活塞以一定速度移动并通过位移来进行流体的体积传输。为了用注射泵产生恒定的流量,活塞的横向运动必须保持极其一致。在这方面,通常常规的注射泵是很难实现的,因为其驱动部分的分辨率受到限制。反过来,这也导致脉动的产生。但是,泵的测量元件(编码器)的分辨率确是至关重要的。
活塞的横向运动必须由受控的驱动系统产生。通常,电动机的旋转通过主轴驱动器转换成线性运动。位置控制器以固定的小间隔检查实际位置或电动机的旋转角度,并将其与各自的目标位置进行比较。实际值与目标值之间的偏差决定了电机所需的控制量,这种偏差取决于操纵电机的电流。分辨率低的位置传感器会导致更长的测量间隔,特别是在速度较慢的情况下。因此,控制器以相对较长的间隔接收有关活塞的实际位置的信息,这会使控制校正变得复杂,并导致速度波动。
以下示例将使这一点更加清楚。 想象一下一个控制电路,该电路规定汽车驾驶员必须行驶一定距离,但是每两秒钟只能睁开眼睛以检查其位置并进行路线校正。 如果实验以20 km / h的速度在直线轨道上进行,那么它将很好地进行。 但是,如果驾驶员必须转弯,则成功的可能性就会大大降低。 车辆的路径可能类似于多边形的形状,而不是曲线的形状,因为当睁开眼睛时,驾驶员将被迫对其位置进行强有力的校正以保持在正轨上。
Z高分辨率–Z高质量
注射器驱动器中的低采样率会导致恒定的校正,这是通过增加或降低电动机电流来实现的。 这会阻止平滑且平稳的运行并导致脉动。
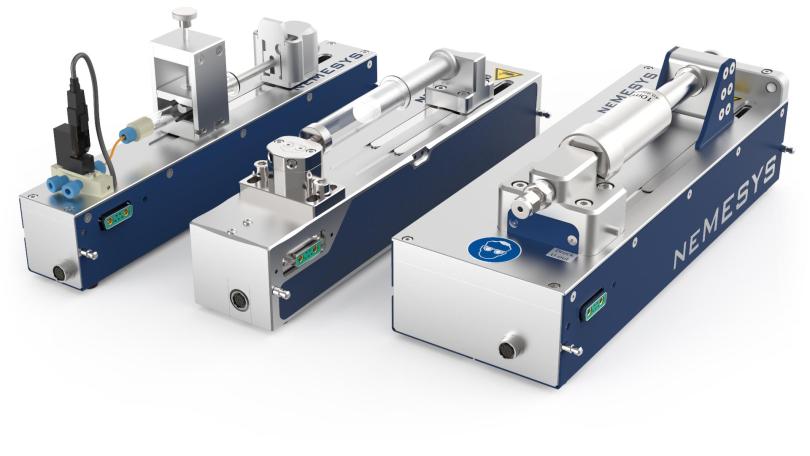
因此,CETONI使用Z高质量的组件,并将其注射泵与分辨率在亚微米范围内的驱动器配合使用。 结果,我们驱动器的脉动是如此微小,以至于在当今的微流体应用中微不足道。 因此,neMESYS注射泵适合具有Z高精确度要求的微流体应用。
用SPAD 23在共聚焦显微镜中实现波动对比度的超分辨率在过去的 20 年里,远场光学显微镜已经跨越了以阿贝衍射极
传感器和数据采集卡的分辨率有什么对应关系?传感器分辨率小于数据采集卡和传感器分辨率大于数据采集卡这两种情况
Z近新添了一台sony32寸液晶电视装上以后发现字幕和台标一直在垂直闪动在线咨询了一下相关人员说是可能因为
我家电脑的显示屏连接线接触不良,所以换了个新线,可发现换了线后分辨率1440*900没了【电脑是19寸宽屏
在视频展示台主要技术指标中有一项事CCD分辨率,请问这指的是什么啊? 1.什么是CCD? CCD是C
镜头分辨率和CCD想素的关系 说明两个分辨率的区别 说明白点 2者的关系是图象大小和清晰度的关系 分辨率
20微米分辨率ccd相机等于多少像素 相机的像素,取决于感应器的大小和感光点的密度,不知道感应器的大小,
(当然Z好1000帧,分辨率300万像素以上的相机)求国外品牌推荐以及价位。还有就是频帧和分辨率是不是不能
现在的CCD尺寸不变的情况下,Z大分辨率越来越高,我想问,如果我把拍摄的分辨率降低,是否可以得到更高质素的
水下机器人GnomBABY型号的摄像机,是PAL制式的CCD彩色摄像机,它的分辨率和帧频是多少? PAL

沪公网安备 31011502008050号




