【仿生机器人】| 北理工仿生机器鼠SQuRo研发
关键词:四足机器人;模仿学习;运动性能评估
技术方案:智能体位姿追踪系统
01
研究背景
从公元前3500年人类发明了轮子开始,轮式工具极大地提高了交通和运输效率。但在不断的使用过程中,轮式运动方式的局限性逐渐暴露:即对山地、丘陵、台阶等复杂地形的适应性差。四足哺乳动物可以在崎岖复杂的地形自如行走,因为四足运动方式落足点是离散的,可以跨过障碍,而且没有横向约束,可以全方位移动,而且足端运动和躯干质心解耦可以起到隔振作用,保证质心稳定。
四足机器人以四足动物为仿生对象,在具有比双足机器人更具稳定性的同时,又比六足机器人机械结构简单。
从20世纪60年代开始,针对四足机器人的研究已经陆续开展,目前四足机器人已经广泛应用于工厂巡检、地震救灾、未知环境探索甚至地外行星探索,具有广阔的沿用前景。

ANYbotics四足机器人(图片来源:ANYbotics)
BigDog、ANYmal等大型四足机器人对于复杂环境适应能力强,具有较强的运载能力,但是对于管道或者废墟缝隙等狭窄空间,考虑到其体积,大型四足机器人很难进行探索和作业;而sub-2g等微型四足机器人,虽然体积小可以在狭窄空间穿越,但是由于绝 对负载能力低,无法满足探索和运输任务。开发一个具有一定移动能力和负载能力的小型机器人至关重要。
02 北理工SQuRo仿生机器鼠研制
老鼠因其细长身形和敏捷运动能力,可以在狭窄环境快速运动,吸引了研究人员的广泛关注。北京理工大学福田敏男教授团队骨干成员石青教授及其带领的仿生机器人团队设计研发了一款机器大鼠SQuRo。

机器鼠SQuRo
研究人员先利用X光获取并研究大鼠的运动骨骼关节结构。通过分析发现,大鼠能在狭窄环境灵活运动,主要依赖来于:三自由度颈椎运动、脊柱屈伸和侧屈、四肢运动。经过简化和参照设计,为机器鼠模型配置12自由度(颈部2自由度,腰部2自由度,四肢各2自由度)。机器鼠尺寸为188×55×90mm,重220g,与8周大的大鼠相当。

机器鼠自由度配置
团队提出一种多模态运动规划控制框架,根据环境不同切换运动策略,可以实现更快速稳定的响应。
为了验证机器鼠基础运动性能,石青教授团队进行了一系列实验,包括蹲起、行走、爬行、转向等,实验结果证明SQuRo机器鼠可以高效且灵活的进行运动,而且其转弯半径只有66mm(0.48个身体长度)。针对实际应用场景,研究人员还进行了通过不规则通道、爬坡、携带负载及跨越障碍等特殊场景实验,以上测试SQuRo均可顺利完成,其负载可以达到200g(自重的91%),并且能穿越30mm高的障碍物。
03 机器鼠稳定性优化
在研制仿生机器鼠的过程中,需要对机器鼠的俯仰角、弯曲角、弯曲距离等动作姿态数据进行分析,以量化指标评估机器鼠性能。
凌云光·元客视界方案工程师搭建了2mx2m的紧凑空间,采用9台光学动作捕捉相机,精确地对机器鼠的头部、背部、腿部、尾部等重要测试部位进行追踪。由于机器鼠关键部位尺寸都极其细小,而且自重很轻,为了在轻量化负重前提下精 准获取关键部位的位置信息,凌云光·元客视界提供了定制的3mm标记点,针对细小的结构精 准获取机器鼠的运动姿态信息。

04 机器鼠运动生成策略研究
此外,石青教授团队还进行了仿生机器鼠-真实大鼠交互的研究。将机器鼠放入真实大鼠社会,获取动物行为反馈,有助于了解大鼠的决策制定过程,比如运动方式、伴侣选择、捕食者-猎物相互作用等。在此过程中,机器鼠运动越接近真实大鼠运动,得到动物行为反应越好。但是不同时间大鼠同一行为的运动特征是不同的,因此合适的运动生成策略至关重要。
在之前的研究中,研究人员尝试过单次编程或人工操作等方式来控制大鼠运动,但效果都不理想。为了生成接近真实大鼠的自然运动,石青教授团队提出一种利用模仿学习(IL)的运动生成策略。模仿学习方法不需要传统编程语言控制机器人运动,只需要提供一组专家的行为演示数据。利用这些演示数据,机器人可以自动生成运动控制程序。

动物演示、策略优化及仿真系统架构
首先,将两只大鼠(分为demo rat和valid rat)放置于捕捉空间内,大鼠关节关键节点粘贴小型标记点,利用动作捕捉系统采集两鼠交互运动数据。大鼠间交互运动典型动作包括理毛(AG)、接近(AP)、跟随(FO)、远离(MA)、后颈攻击(NA)、钳制(PI)、社交性鼻子触碰(SNC)。首先用Optitrack采集200000帧大鼠交互数据作为训练集(training set),对预测块进行训练。另外采集200000帧数据作为验证集(validation set),用于在交互仿真系统中评估算法。
在仿真系统中,两只机器鼠分为demo robot和policy robot,demo robot直接根据验证集数据复制demo rat的运动行为,policy robot根据模仿学习生成的行为指令进行运动。实验关注指标包括行为相似度、有效交互时间以及专注时段。通过结果可以看出policy robot可以生成接近动物的行为,而且机器人间交互持续时间比大鼠间的增加了16%,专注时段也更长。

实验验证虽然是将真实交互数据输入仿真系统进行的,但是由于验证集和训练集数据不同,而且是利用同一套动作捕捉系统采集的大鼠数据,可以认为仿真系统中demo robot的行为与现实大鼠行为一致。后续研究人员也会进行大鼠-机器鼠真实场景下交互实验。
05 国产动作捕捉系统助力高校科研
元客视界是凌云光设立的全资子公司,主要面向元宇宙虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算光学成像等应用,已形成光场建模、运动捕捉、全景成像、XR拍摄在内的产品布局。

FZMotion光学运动捕捉系统是凌云光·元客视界自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。
FZMotion动捕系统在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京大学、北京理工大学、哈尔滨工业大学等高校开展合作。凌云光·元客视界致力于为高校提供完备的解决方案,助力科研发展。
全部评论(0条)
推荐阅读
-

- 神奇的生物仿生科技
- 生物有着我们人类无法相信的高超技术,仿生科技指的是模仿那些生物的卓 越结构和机能,创造出的技术!
-

- 东华大学游正伟团队ACS Nano:具有高度灵活性的三维运动仿生机器人
- 光热材料通过简单的光照射实现时空可控的运动和连续的能量供应。通过结合各种功能填充物、编程方向、图案和三维结构,可以进一步改变运动。这项工作中开发的设计原理和材料将激发下一代功能性软机器人的灵感。
-
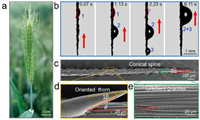
- 西南科大仿生微纳精密制造团队:精密3D打印构建仿生麦芒分级系统用于高效雾水收集
- 雾水收集对解决水资源短缺具有重要的意义,如何提升雾水收集效率一直是研究热点。高效的雾水收集需要同时满足高效捕捉和快速传输两个严苛的条件。
-
- 论文分享 | 北京科技大学基于矢量场的微型仿生扑翼飞行机器人的路径跟踪
- FZMotion助力高校科研
-
- 科普直播回顾|揭开荷叶仿生材料的奥秘
- 取一小块伞面布料,制样后放到飞纳电镜下观察,发现和疏水衣物面料表面微观结构类似,纤维表面都有较多的附着物。结合能谱结果发现,主要成分主要为 C、O、Si。
-
- 【网络研讨会】结合芯片组织与3D打印,构建仿生体外模型
- 【网络研讨会】结合芯片组织与3D打印,构建仿生体外模型
-

- 科研级超高精度3D打印在仿生材料领域的应用
- 传统制造技术很难仿造出此类复杂的微结构,而利用3D打印方式可以灵活实现出研究者想要的臂数以调节表面结构与水滴的粘附力
-

-

- 应用 | 高效捕获和灭活生物气溶胶的仿生蜘蛛丝光催化剂
- KRüSS于1796年诞生于德国汉堡,是表面科学仪器领域的全 球领导品牌。先后研发了世界上第 一台商用全自动表面张力仪和第 一台全自动接触角测量仪,荣获多次国际工业设计大奖和德国中小企业最 具创新能力
-

- 中科院仿生材料与界面科学重点实验室2021-2022年度开放基金批准
- 经中国科学院仿生材料与界面科学实验室评审,本年度批准15个开放课题获得实验室资助,见附件1。
-

- 预算230万元 中国科学院苏州纳米技术与纳米仿生研究所 采购离子刻蚀显影系统
- 中国科学院苏州纳米技术与纳米仿生研究所离子刻蚀显影系统采购项目 招标项目的潜在投标人应在www.oitccas.com;北京市海淀区丹棱街1号互联网金融中心20层获取招标文件,并于2025年03月12
-

- 2021-2022年中科院仿生材料与界面科学重点实验室开放基金申请指南
- 争取在仿生智能界面材料、仿生纳米孔道、诱导去浸润、仿生粘附界面、仿生超浸润基础研究等方面取得原创性的基础理论研究成果。同时,在仿生材料与界面科学新技术的应用方面做出重大技术创新。








①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi
最新话题
最新资讯
- 从开发到临床:“黑科技” 破局外泌体下游放大工艺三大核心挑战!
- 邀请函 | 第九届制药工业微生物技术大会
- 邀请函 | 大昌华嘉诚邀您参加中国深圳电池展(CIBF 2025)
- 邀请函 | 第十八届中国科学仪器发展年会(ACCSI 2025)
- 线下培训 | MicrotracBEL(拜尔)比表面分析用户培训会
- 线下培训 | Microtrac(麦奇克)激光粒度仪用户培训会
- 新闻动态丨天美第26届质量千里行——科研产品事业部东区活动概览
- 好消息丨布鲁克电子显微分析中国客户体验中心全新升级啦!
- 渗源实验室超纯水机SYS-III设备顺利安装于广东东南科创科技有限公司
- 会议资讯│东隆科技参加第八届全国激光光谱技术学术论坛
作者榜










参与评论
登录后参与评论