湖南大学王兆龙课题组《Materials Today Physics》:基于3D打印可降解水凝胶的快速可编辑人机界面


水凝胶凭借着可拉伸的三维高分子网络结构以及可供离子传输的水性环境在可穿戴器件、瞬态电子和人机交互等领域具有广泛的应用。然而,伴随着柔性电子领域的快速发展,如何解决大量的柔性电子产品废弃物成为了挑战之一。受此启发,湖南大学王兆龙副教授、段辉高教授与上海交通大学郑平院士、南方科技大学葛锜教授、航天五院杨东升研究员合作,在《Materials Today Physics》期刊上发表了题为“Ultra-fast programmable human-machine interface enabled by 3D printed degradable conductive hydrogel”的文章。该文章利用面投影光刻技术(nanoArch P140,摩方精密)制备了高精度高拉伸可导电水凝胶样品及可编辑线路。在特定环境下,体系能被完全降解,实现柔性电子的环保无残留。

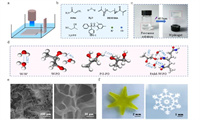
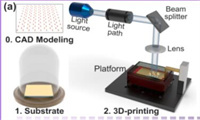
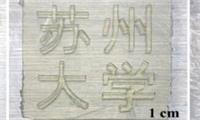
图1 基于面投影微立体光刻3D打印技术的水凝胶。(a)面投影光刻技术原理图。(b)水凝胶前体溶液组成。(c)前体溶液固化前后展示图。(d)H2O-H2O、H2O-PG、PG-PG 和 PAM-H2O-PG 的氢键相互作用的密度泛函理论分析(DFT)。(e)扫描电子显微镜(SEM)图像。(f)基于面投影光刻技术制备的高精度海星和雪花样品。
具体的溶液制备和加工过程如图1a-b所示,先将光引发剂 (2, 4, 6-三甲基苯甲酰基)苯基次膦酸乙酯(TPO-L)分散在1,2-丙二醇中,得到溶液A。同时,将氯化钾(KCl)、丙烯酰胺(AAm)和聚(乙二醇)二甲基丙烯酸酯(PEGDMA)加入去离子(DI)水中混合均匀得到溶液B。将溶液A、B混合均匀,超声处理得到水凝胶前体溶液(图 1c),在405nm紫外光的照射下能被完全固化。三维多孔网络的微观结构保证了高拉伸性能,图2a-c展示了不同成分含量下样品的拉伸性。研究人员通过单轴拉伸测试探究了不同成分含量对拉伸性能的影响。此外,还探究了电导率的影响因素(图2d-h),证明了基于高拉伸导电水凝胶器件的低温工作性能。

图2 力学与电学性能的探究。(a)拉伸测试。不同含量(b) 丙烯酰胺,(c) 1,2-丙二醇的水凝胶样品的应力-应变曲线。不同含量(d)氯化钾,(e)丙烯酰胺和(f)1,2-丙二醇的水凝胶样品的电导率测试。(g)丙烯酰胺和去离子水质量比为3的水凝胶样品的差示扫描量热(DSC)曲线。(h)不同温度下的电导率。(i) 拉伸与导电性能的综合展示。
水凝胶的可降解的性能由酰胺基和交联剂的共同水解实现,图3b展示了六边形水凝胶样品的降解过程(pH=13)。通过改变样品的形状、厚度或表面积,能够对其降解速度进行调控。除了几何参数,水凝胶前体溶液的成分含量、环境的pH值和温度都会影响降解速率。(图3c-g)

图3 降解性能探究。(a)碱性环境中的降解原理图。(b)六边形水凝胶样品在pH值为13的碱性溶液中的降解过程。不同含量(c)丙烯酰胺,(d)PEGDMA和(e)1,2-丙二醇的水凝胶样品的降解时间测试。(f)不同pH值下的降解时间。(g)不同温度下的降解时间。
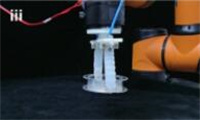
基于高拉伸可降解导电水凝胶的柔性电子具有优异的工作性能,研究人员将其应用在柔性传感及人机交互等应用中。如图4a-b所示,基于水凝胶的柔性传感器对于重复的机械运动具有准确灵敏的监测能力,具有广泛的传感范围,从而达成稳定传感的目的。研究人员主要对手指弯曲、不同频率的重复运动、吞咽、发音等动作进行了监测。研究结果如图4c-i所示。除此之外,研究人员还利用水凝胶器件的可降解性能对瞬态电子及可编辑人机界面应用的可行性进行了探究。图5a展示了通过降解和修复能够实现串并联电路的快速转换。人机界面由基于水凝胶电路的肌电采集系统组成(图5b),可稳定获取五个手指的肌电信号,开发的 EMG 收集系统能够对复杂的手势进行编码,实现人手控制机械手进行动作,如图5c-g展示,证明了基于3D打印可降解导电水凝胶在快速可编辑人机界面应用的可行性。值得一提的是,基于水凝胶的体系能被完全降解,为可编程和环保可穿戴设备提供了新思路。

图4 基于水凝胶的柔性传感器监测性能。(a)不同应变下水凝胶应变传感器相对电阻变化曲线。(b)不同拉伸率下的灵敏度。(c) 手指弯曲,(d)手指不同频率连续弯曲,(e)肘部连续弯曲,(f)行走期间膝盖弯曲,(g)吞咽,(h)发声和(i)恒定压力下的传感曲线。

图5 可编辑电路及人机界面应用。(a)基于水凝胶电路的降解和修复。(b)采集系统工作原理示意图。(c)所开发的 EMG 采集系统捕获得到的五个手指 EMG 信号。(d)暴露于碱下的EMG 采集系统捕获得到的EMG 信号。(e)基于可降解水凝胶的可编程人机界面示意图。(f)采集得到的不同手势的信号。(g)快速可编辑人机界面工作展示。
该项研究成果获得了广东省重 点领域研究发展计划,湖南省自然科学基金,民用航空航天技术研究项目和中国空间技术研究院空间探索计划和钱学森实验室等实验及研究项目支持。
原文链接:https://doi.org/10.1016/j.mtphys.2022.100794
欢迎各位专家学者提供稿件(微纳3D打印相关研究成果、前沿技术、学术交流)。投稿邮箱:bmf@bmftec.cn。
该文章发布的目的在于传递更多信息,如涉及作品内容、版权或其它问题,请于我司联系,我们将在第 一时间删除内容!


全部评论(0条)
推荐阅读
-
- 湖南大学王兆龙课题组《Materials Today Physics》:基于3D打印可降解水凝胶的快速可编辑人机界面
- 水凝胶凭借着可拉伸的三维高分子网络结构以及可供离子传输的水性环境在可穿戴器件、瞬态电子和人机交互等领域具有广泛的应用。
-

- 加州大学河滨分校杜可课题组«Langmuir»: 基于3D打印的液态核心光流体
- 加州大学河滨分校的杜可教授团队针对以微型结构为基底的液态核心光波导进行了研究,并采用近年受到瞩目的面投影微立体光刻技术取代了先前基于黑硅(black silicon)的平板式封装设计。
-

- 湖南大学韩晓筱课题组《Nature Communications》:新型光散射抑制机制助力高保真光固化生物3D打印
- 光固化生物3D打印技术(如:数字光处理,DLP)可精确控制细胞和生物材料在空间中的分布,以此构建复杂几何结构,被广泛应用于组织工程、药物筛选、外科植入物等生物医学研究领域。
-

- 希伯来大学-3D水凝胶单细胞培养研究
- Bavli等人基于液滴微流控技术,研发了一种名为“CloneSeq”的高灵敏单细胞分析平台,可用于3D细胞培养的全面表征,揭示了新的癌症特异性亚群的存在
-
- 浙江大学宁波研究院吴晶军副研究员《Mater. Horiz.》:DLP 3D打印具有多级结构的水凝胶
- 浙江大学宁波研究院吴晶军副研究员团队开发了一种通过离子交联锁定3D打印水凝胶冻干孔隙的后处理方法制备具有多级孔结构水凝胶。
-
- 西安交通大学张留洋课题组《Optics Letters》:3D打印的基于环偶极子的高性能太赫兹传感器及其应用
- 西安交通大学张留洋老师课题组提出了一种面外太赫兹传感器,通过面外结构,增强了光和物质的空间重叠,从而增强传感性能。
-

- 基于氧化果胶和明胶的多功能水凝胶促进伤口愈合
- 通过FTIR和TNBS分析可以确定交联参数,一般来说,交联度随着果胶的氧化而增加。通过BCA试剂盒测定发现交联剂的存在导致溶胀和明胶释放的减少。
-
- 基于侧面数字光处理的3D打印技术快速制备微流控芯片
- 由于在生物、化学及医学等领域有巨大潜力,微流控芯片技术广泛应用于药物筛选、新药开发及癌症研究等多个领域,其中微流控芯片的制备是科研人员关注的热点。
-

- 基于投影微立体光刻的3D打印技术及其应用
- 在实现力学超材料方面,通过投影微立体光刻3D打印技术一次成型以拉压变形占主导的八隅体桁架结构超轻-超硬力学超材料
-
- 苏州大学朱健教授团队《Small》:基于自由基促进的阳离子RAFT聚合实现快速活性3D打印
- 在本文中,该研究团队考察了基于自由基促进的阳离子RAFT(RPC-RAFT)聚合的DLP 3D打印体系,实现了较为快速的打印速率(12.99 cm/h)。
-

- 香港城市大学陆洋教授课题组《ACS Appl. Mater. Interfaces》: 基于3D打印的仿生高韧机械超材料
- 通过利用摩方精密开发的基于面投影微立体光刻(PμSL)3D打印技术(摩方精密nanoArch P130, S140超高精度3D打印系统),实现了仿生机械超材料单元在微米尺度的高分辨制备。
-

- NTU佐藤裕崇/王一凡合作《Additive Manufacturing》:基于改性聚合物3D打印的功能化金属微结构制造
- 相比于传统的金属打印样品,3D 金属-聚合物复合功能器件具有更复杂、精密的结构,更轻的重量,以及更高的设计自由度和更高的集成度。
-

- 基于面投影微立体光刻技术(PμSL)的3D打印
- PμSL技术采用整面曝光,其中曝光图形由DMD控制产生。
-

- 西安交通大学张辉课题组《Materials & Design》:PμSL 3D打印花瓣状微结构表面实现液滴操控、油水分离和减阻
- 花瓣状微结构表面具有优异拒水性可用于超大液滴承载、微反应器、无损液滴搬运、倾斜表面液滴快速脱附、油水分离、气泡保持和减阻等领域。
-
- 北航文力课题组《Nature Communications》:基于超精密3D打印柔性传感的软体机器人“非接触式”交互示教
- 操作人员通过裸手不仅能够实现对具有大量自由度的软体机器人的非接触控制,而且可以完成各类复杂的操作。

①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi








参与评论
登录后参与评论