近年来,随着多智能体系统(MAS)的广泛应用,针对多智能体协同控制问题的研究逐渐增多,分布式协同方式在这一方面取得了显著成果。然而,在实际应用中,单个智能体由于自身的特性或特定需求目标,往往无法遵循一致编队目标;同时由于通信限制,所有智能体不能完全协同合作,一些未知环境扰动也会影响编队的形成。
从博弈论的角度来看,整个问题可被归结为纳什博弈问题,在这种情况下,每个智能体都会试图通过预测其他智能体的行为来优化或调整自己的行为,以达到整体上的纳什均衡。
近年来,基于纳什策略的研究提出了处理未知扰动的编队控制方法,将未知扰动视为纳什博弈的参与者,扰动抑制问题被建模为控制输入和扰动之间的非零和博弈问题。而利用纳什博弈策略对未知扰动和领导者未知输入情况下的二阶MAS实际编队跟踪问题尚未得到广泛研究。
MAS建模与编队跟踪问题
为了解决以上问题,北京航空航天学院无人系统研究院研究团队提出了基于分布式博弈策略的多智能体鲁棒编队跟踪协议,以应对外部扰动和领导者的未知输入;并构建了一个具有5个移动机器人的实验平台,使用FZMotion光学运动捕捉系统进行真值验证,以证明所提出的鲁棒编队跟踪协议的有效性。
实用的鲁棒编队协议设计
首先,研究团队构建了具有扰动抑制的博弈策略,设计了一种实用鲁棒编队跟踪协议,每个无人车无需知道或估计扰动,根据通信交互来最小化自己的性能指标。
研究人员通过纳什均衡推导出博弈策略,并引入分布式终端状态观测器,让每个跟随者能够估计自身终端状态,使编队跟踪控制策略能够分布式实现。此外,团队还分析了最坏情况下的纳什均衡近似值,使所提出的编队跟踪控制策略能够在合理的控制参数下保证 ε-纳什均衡。
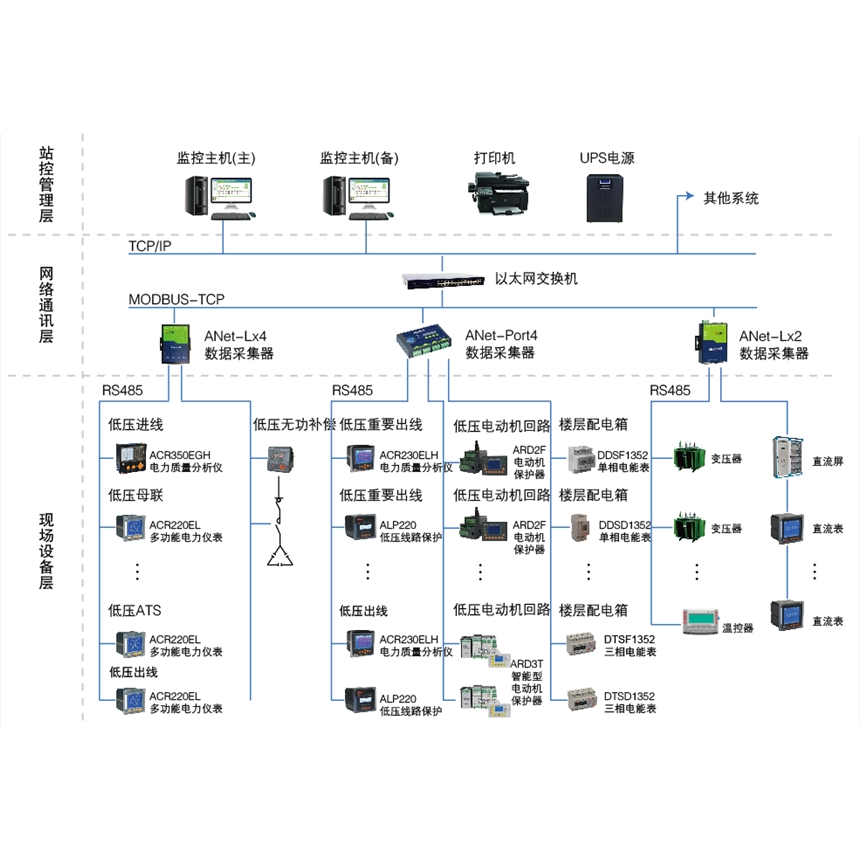
系统框架图
算法设计如下:
(7)编队跟踪博弈策略;(8)终端状态观测器
实验设计
此前对于纳什博弈策略的验证大多为数值模拟,为了通过真实实验验证所提方法有效性,研究团队构建了一个具有5个轮式移动机器人的多智能体系统验证平台,使用FZMotion光学运动捕捉系统捕捉移动机器人的实时位置与速度信息,并作为真值验证。
实验平台
实验场地设置在北京航空航天大学青云智创实验室,场地全域覆盖FZMotion高精度光学运动捕捉系统。为了更好地测试所提方法的有效性和鲁棒性,研究团队在试验开始8s后为每个移动机器人控制器的的输出信号增加一个额外扰动。
B站实验视频
团队分别进行了所提方法的MAS数值模拟和真实实验,从结果可以看出,通过使用所提方法,四个跟随者移动机器人最终形成一个四边形编队,并精确稳定地跟踪领导者的状态轨迹;实际的位置和速度的编队跟踪误差均收敛。
MAS轨迹:(a)模拟结果(b)实验结果
圆圈为起点,五角星、三角形分别代表领导者和跟随者的轨迹结束点
速度、位置的编队跟踪误差
数值模拟和真实实验结果均论证了所提出的分布式博弈策略的有效性和实用性。在未来的研究中,研究团队将进一步把分布式博弈策略推广至包含约束条件的高阶多智能体系统中,旨在解决更为复杂的纳什博弈问题。
关于「」
是凌云光设立的全资子公司,主要面向元宇宙虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算光学成像等应用,已形成光场建模、运动捕捉、全景成像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。
FZMotion光学运动捕捉系统
FZMotion动捕系统在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京航空航天大学、北京理工大学、哈尔滨工业大学等高校开展合作。凌云光·致力于为高校提供完备的解决方案,助力科研发展。
原文链接:
标题:Practical robust formation tracking for multi-agent systems with a nonautonomous leader: A game-based approach.
作者:Zhexin Shi, Jianglong Yu, Xiwang Dong, Qingdong Li, Xiaoduo Li,Zhang Ren
机构:北京航空航天大学
原文链接:https://www.sciencedirect.com/science/article/pii/S0016003224006847
全部评论(0条)
 虚拟摄像机- Insight VCS
虚拟摄像机- Insight VCS
报价:面议 已咨询 1716次
 低照度星光抓拍机-SQ系列
低照度星光抓拍机-SQ系列
报价:面议 已咨询 1736次
 高清智能交通一体机-SQ系列
高清智能交通一体机-SQ系列
报价:面议 已咨询 1655次
 CMOS高清交通抓拍机—SQ系列
CMOS高清交通抓拍机—SQ系列
报价:面议 已咨询 1531次
 TOF相机-SR系列
TOF相机-SR系列
报价:面议 已咨询 1570次
 多光谱相机-2CCD系列
多光谱相机-2CCD系列
报价:面议 已咨询 1699次
 X-RayCMOS平板探测Shad-o-box 系列
X-RayCMOS平板探测Shad-o-box 系列
报价:面议 已咨询 1824次
 X-Ray面阵CMOS平板-Xineos系列
X-Ray面阵CMOS平板-Xineos系列
报价:面议 已咨询 1646次








①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi
 微反系统在精细化工与制药领域的创新应用
微反系统在精细化工与制药领域的创新应用











参与评论
登录后参与评论