

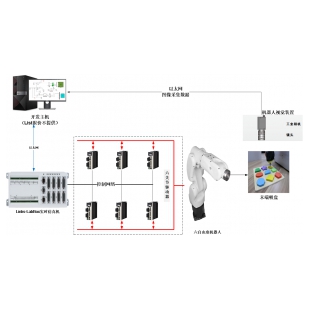
 硬件在回路HIL半实物实时仿真六自由度机器人半实物实验平台
硬件在回路HIL半实物实时仿真六自由度机器人半实物实验平台
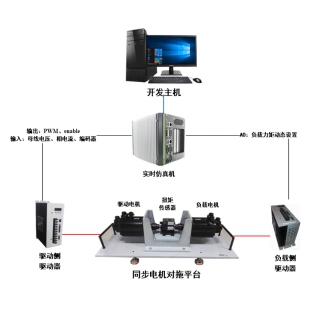
 硬件在回路实时仿真无人机飞控半实物实验平台
硬件在回路实时仿真无人机飞控半实物实验平台
 半实物仿真平台
半实物仿真平台
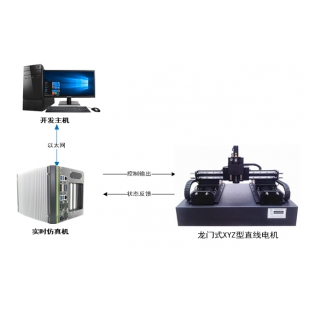
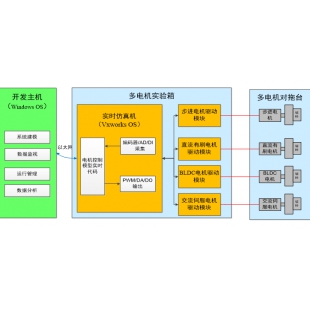 硬件在回路半实物实时仿真多电机控制半实物实验平台
硬件在回路半实物实时仿真多电机控制半实物实验平台
 硬件在回路HIL实时仿真桌面级六自由度机器人半实物实验平台
硬件在回路HIL实时仿真桌面级六自由度机器人半实物实验平台
室内多智能体协同控制实验平台
一、平台概述
二、特征优势
采用室内光学运动捕捉技术,定位范围5m×5m(可定制扩展),支持毫米级定位,能够最多同时捕捉12架左右的无人机或无人车;
本平台系统支持4架无人机及2台无人车进行编队实验(被控对象数目可根据实验室具体情况扩展);
可在MATLAB/Simulink软件平台上进行的控制算法研究,支持自动生成代码,通过无线WiFi下载到无人机飞控板及无人车控制板;
系统支持C、C++、python编程,适合有一定代码开发能力的学生,进一步锤炼代码编程能力;
MATLAB/Simulink中提供了ROS的支持包,可实现Simulink控制模型到ROS系统代码的自动生成,降低了ROS系统控制模型的开发难度,适合大众化本科教学实验。
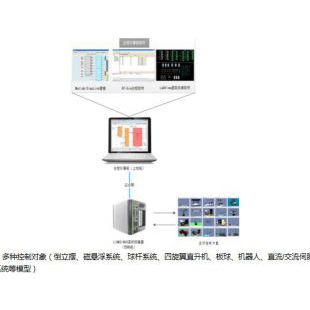
可用于无人工具的动态建模和控制研究、运动规划、避障控制、多信息融合、编队控制、多智能体协调控制、无人工具自主控制等。
(1)基于Simulink数学仿真实验
❉❉(2)定位系统实验
运动捕捉系统定位实验; 地面标记定位实验;
❉❉❉ ❉❉❉ ❉(4)单车控制实验
硬件组成认识; 基于激光SLAM的机器人的自主定位导航; 软件开发环境学习和使用;
❉(5)多机编队飞行试验
基于运动捕捉定位的多机编队飞行实验; 基于地面标记定位的多机编队飞行实验。
❉❉(7)多智能体协同编队实验
基于摄像捕捉定位的多车、多机编队运行实验; 基于期望目标任务的多车、多机编队运行实验。
产品名称
系统配置 | ||
LINKS-RS-UAV/TB-01 | Links-UAV-LargeRealPlane | |
Links_BOT | ||
Links-AutoCoder | ||
Links-GCS | ||
Links-OptiCapture | ||
Links-MCTool | ||
实验示例包 | ROSLinks-ROS-Demo | |
❉
上传人:北京灵思创奇科技有限公司
大小:0 B
692
报价:面议
已咨询995次半实物实时仿真机
报价:面议
已咨询1238次半实物实时仿真机
报价:面议
已咨询1098次半实物实时仿真机
报价:面议
已咨询806次半实物实时仿真机
报价:面议
已咨询1750次半实物实时仿真机

报价:面议
已咨询1211次半实物实时仿真机
报价:面议
已咨询842次半实物实时仿真机

报价:面议
已咨询1195次半实物实时仿真机
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。

实时仿真机 一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
一、产品概述 实时仿真机是一种嵌入式工业计算机,具备丰富的I/O资源,并运行嵌入式实时操作系统。面向不同的应用场景,我公司提供多种类型的实时仿真机供用户选择。 二、特征优势 1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。 三、硬件组成 实时仿真机有多种基本硬件配置,可根据用户需求进行定制。
1、支持RCP快速原型设计 实现用户的Matlab/Simulink仿真模型到嵌入式控制原型的自动转换; 2、支持HIL硬件在回路测试 用户的控制器等实物设备可以直接与Links-Box快速原型仿真器连接,动态验证实物控制器性能; 3、IO资源丰富 有大量的IO板卡资源供用户选择,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。 4、可选配型号多 可选配型号多:根据不同的应用场景,有嵌入式单板设备、PCI/CPCI/PXIe等多种架构设备供选择。


